6 min read
Cornell Students Aid NASA with Drone Safety in SkyJim Banke
Managing Editor/Senior Writer
May 07, 2026 ArticleContents
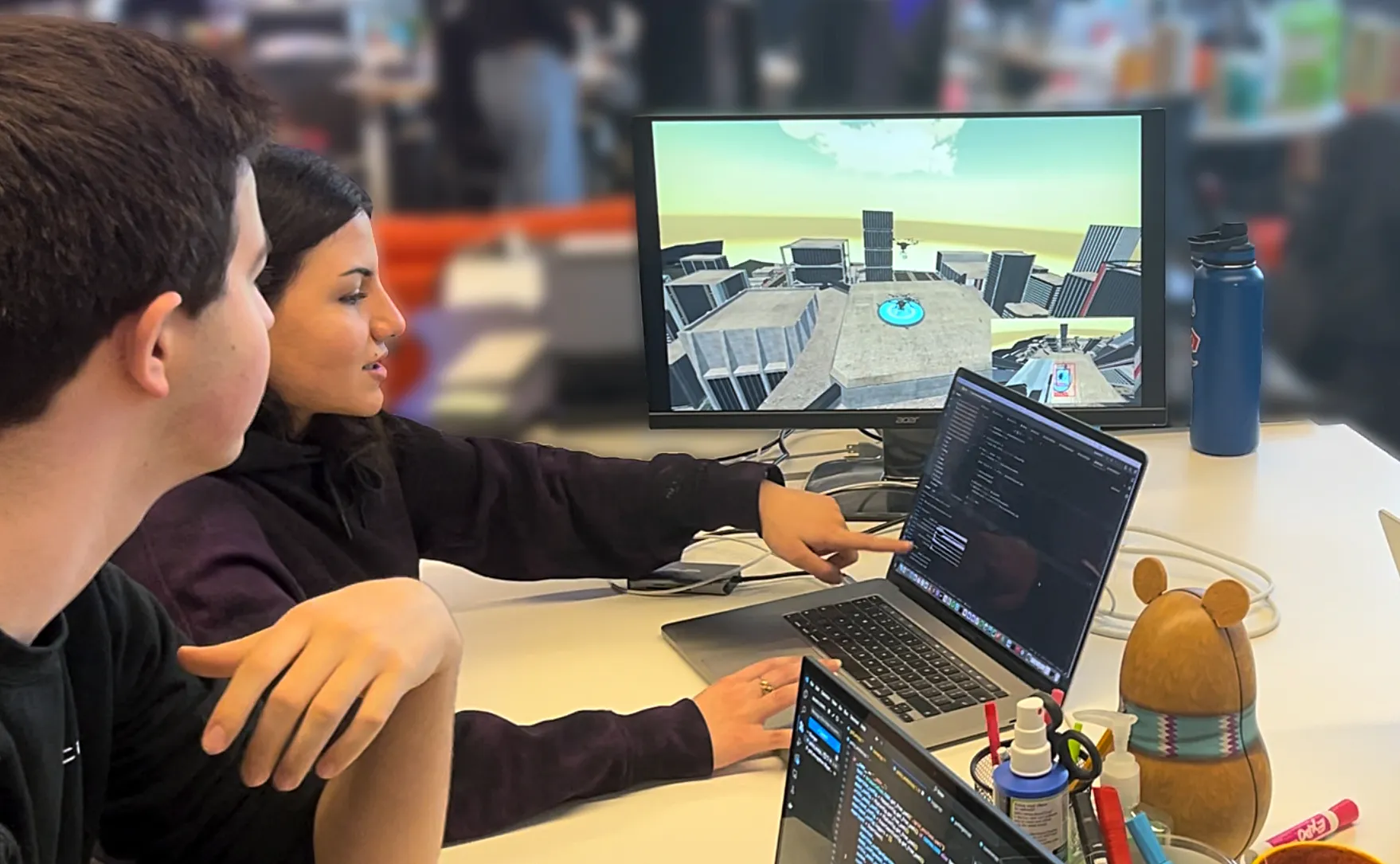
- Students from Cornell University are shown working with an air transportation management tool in which a real drone flying over a remote field thinks its operating with imaginary drones flying in a simulated urban environment. Their work is the result of a NASA grant that is part of the agency’s University Student Research Challenge. Cornell University / Mehrnaz Sabet
A team of Cornell University students are turning heads within industry and the federal government with the results of their research into creating a national air transportation management system in which thousands of drones could safely operate together.
NASA is sponsoring their work through the Mehrnaz Sabet, a doctoral candidate in the field of information science at Cornell University, leads a student team testing technologies used in a drone traffic management system under a grant from NASA’s University Student Research Challenge, She is seen during a drone traffic simulation exercise taking place in a rural field. Cornell University
Two worlds joined
The key to the Cornell team’s research is the notion of integrating a simulated world with the real one to test and demonstrate how drones can learn to adapt to potentially hazardous conditions and make necessary corrections in their flight path on their own.
Knowing they could not go out and fly 100 drones at the same time to test their ideas for tactical deconfliction, the students decided to create an entirely virtual urban world to evaluate different high-volume traffic models, separation algorithms, and related data.
“Our first year of the project went into adapting and scaling that simulation engine and it all went very well,” Sabet said. “But we didn’t want to stick to a simulation. We wanted to see how the simulation translated to the real world, which mattered more.”
Still hampered by the limitations of how many drones they could operate and where they could fly – not many and basically in the middle of nowhere – they sought the best of both worlds, real and imagined.
“What we wound up doing was to embed the simulation into a real drone, so the drone thought it was flying in a dense urban environment although it was actually flying out in an open field where there wasn’t a real city in sight,” Sabet said.
before after A drone designed and built by Cornell University students hovers over an open field during a test of air traffic management system technologies in which the drone “thinks” its flying within an urban environment. The goal is to prove a system in which drones can safely react to unforeseen events and avoid each other in the sky without human intervention. Cornell University Several drones appear in a Cornell University computer graphic simulation of an urban environment in which an air traffic management system is tested to show how the drones can safely alter course on their own to avoid colliding. Cornell University beforeafter A drone designed and built by Cornell University students hovers over an open field during a test of air traffic management system technologies in which the drone “thinks” its flying within an urban environment. The goal is to prove a system in which drones can safely react to unforeseen events and avoid each other in the sky without human intervention. Cornell University Several drones appear in a Cornell University computer graphic simulation of an urban environment in which an air traffic management system is tested to show how the drones can safely alter course on their own to avoid colliding. Cornell University
before
afterdrone flight test
Combing real and simulated worlds
CurtainToggle2-Up Image Details The image at left (BEFORE) shows a Cornell University student-designed and built drone flying in the open above an isolated, rural field. The image at right (AFTER) shows the simulated urban environment the real drone “thinks” its flying in as it calculates all the imaginary drones’ flight paths (the blue and yellow lines) to find the best trajectory to safely avoid a collision. This combining of real and simulated worlds allows the drone to safely test its traffic avoidance technologies.Real world lessons
This allowed the team to try out different traffic management tools and evaluate how drones might coordinate course corrections and avoid collisions with each other.
During the past year, they’ve taken the idea further by flying two real drones in the real world, each running the real-time simulation on board, allowing them to coordinate and “see” both simulated traffic and each other within the integrated test environment.
“We would then intentionally put them on a direct collision course to stress-test the detect and avoid and coordination models and see how well they react and coordinate the drone’s maneuvers to avoid hitting each other,” Sabet said.
Their success struck a chord with NASA experts in
Jim Banke
Managing Editor/Senior WriterJim Banke is a veteran aviation and aerospace communicator with more than 40 years of experience as a writer, producer, consultant, and project manager based at Cape Canaveral, Florida. He is part of NASA Aeronautics' Strategic Communications Team and is Managing Editor for the Aeronautics topic on nasa.gov. In 2007 he was recognized with a Distinguished Public Service Medal, NASA's highest honor for a non-government employee.
Facebook logo @NASA@NASAaero@NASAes@NASA@NASAaero@NASA_es Instagram logo @NASA@NASAaero@NASA_es Linkedin logo @NASAExplore More
4 min readThere’s No Place Like NASA’s New X-59 Hangar Home
Article 1 week ago 8 min readNASA Celebrates Decade of University Innovation in Aeronautics
Article 2 weeks ago 4 min readNASA Releases Powerful LAVA Software to US Aerospace Industry
Article 2 weeks ago Keep ExploringDiscover More Topics From NASA
Missions
Artemis
Aeronautics STEM
Explore NASA’s History
Share
Details
Last Updated May 06, 2026 EditorJim BankeContactSteven Holzsteven.m.holz@nasa.govLynne Sahaylynne.sahay@nasa.govRelated Terms